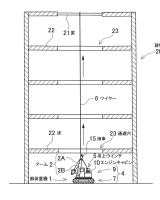
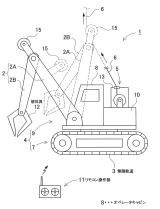
フクブルは現在、次世代のビル解体工法『スパイダーロボ工法』(特許出願中)の開発に取り組んでいます。 『スパイダーロボ工法』とは、現在非常に解体困難である狭隘地に建つビルを解体する工法です。 クレーン等を使わずに、自機のみでビルの上まで吊り上がることのできる特殊な重機を使った工法で、 このアイデアは、平成26年度ものづくり補助事業で採択されました。